随着自动驾驶技术向L4/L5级别发展,系统架构的选择直接影响性能、安全性和开发效率。紧耦合与松耦合作为两种主流架构方案,各有优劣,适用于不同场景。
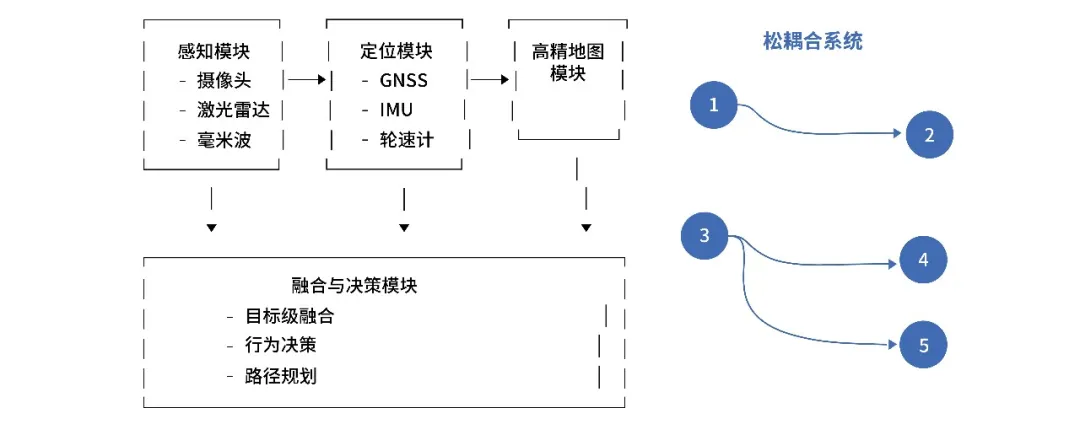
松耦合指的是系统各个模块之间依赖性较低,各模块可以独立运行和更新。松耦合系统的优点是模块间的相互独立性使得系统更容易维护和扩展;但缺点是模块间的通信成本较高,可能会影响系统的整体性能。
关键特征: 模块化设计;接口标准化;独立开发调试;结果级融合;
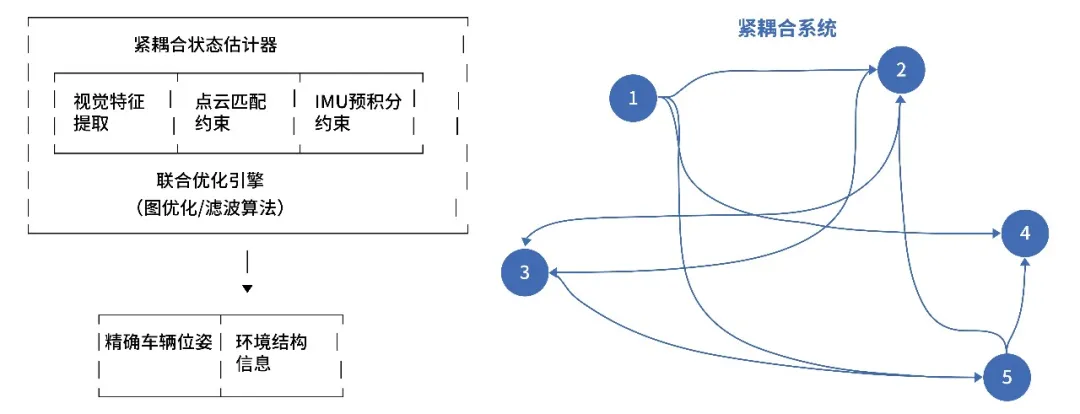
紧耦合指的是系统各个模块之间依赖性很强,它们通常需要共享数据和状态信息。紧耦合系统的优点是可以提高性能和效率,因为各模块之间的通信成本低;然而,这种高依赖性也使得系统难以维护和扩展,因为修改一个模块可能会导致其他模块的变化。
关键特征: 数据级融合;联合状态估计;深度集成;闭环优化;
松耦合架构:
紧耦合架构:
数据流对比:

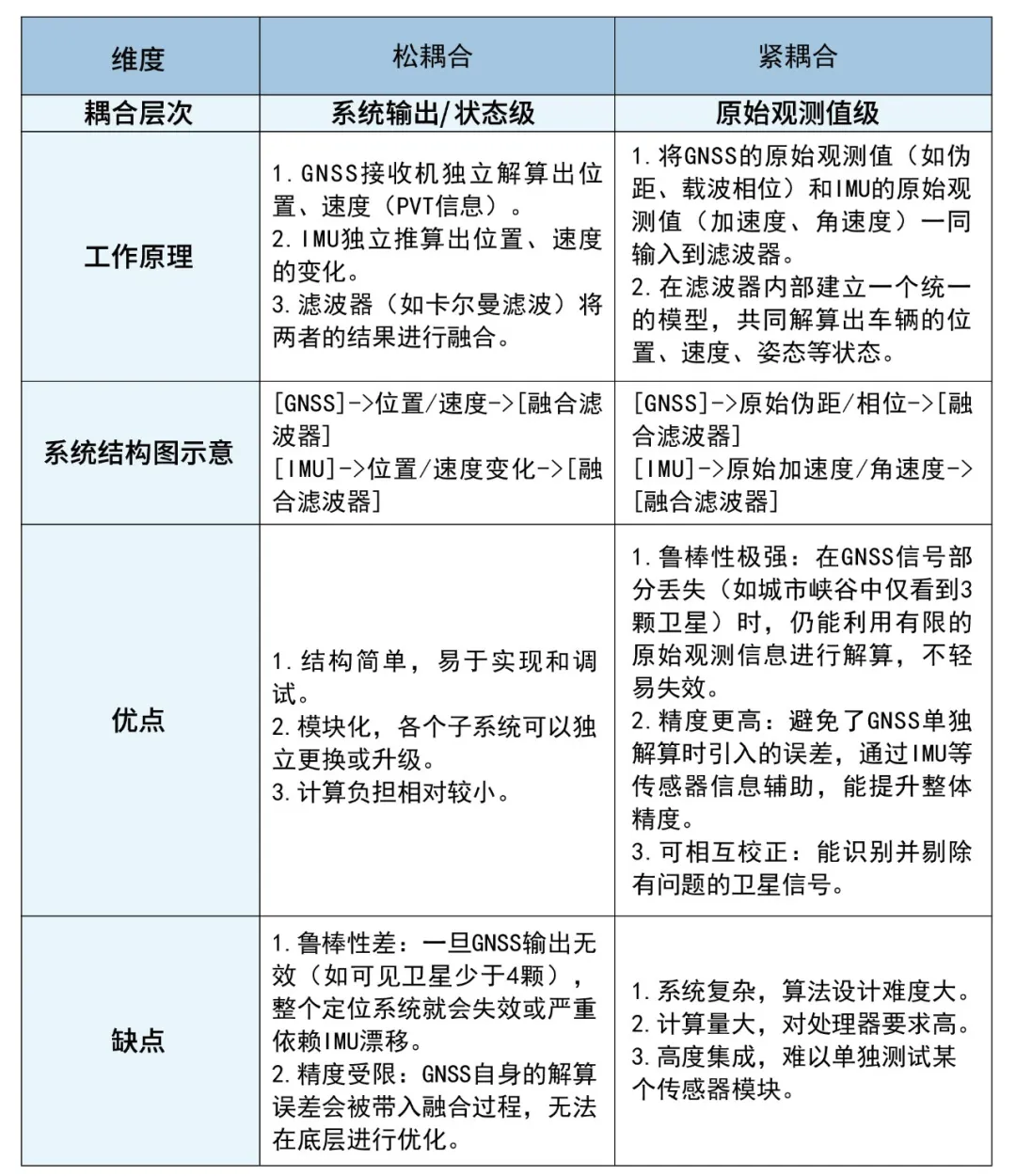
技术细节对比:
在自动驾驶中,这个概念最常用于定位(尤其是GNSS全球导航卫星系统 + IMU惯性测量单元的组合)和传感器融合。下表以定位为例进行详细对比:
在其他自动驾驶算法中的应用:
耦合的概念不仅限于GNSS/IMU定位,也广泛存在于其他算法模块:
1. SLAM
松耦合: 激光SLAM独立输出一个位姿估计,然后与IMU的位姿估计进行融合。
紧耦合: 将激光点云的原始观测,与IMU预积分结果直接放在同一个优化函数中,共同求解最优的位姿和地图。
2. 传感器融合目标检测
松耦合: 激光雷达检测出3D障碍物框,相机检测出2D图像框,然后将两个框进行关联和匹配。
紧耦合: 将激光雷达的点云数据投影到图像像素平面,或者将图像特征提取后与点云特征在数据层面进行深度融合,再进行目标识别和分割。这种方式能有效提升检测精度和鲁棒性(尤其在恶劣天气或相机/激光雷达某一传感器失效时)。
鲁棒性评估:

开发复杂度:
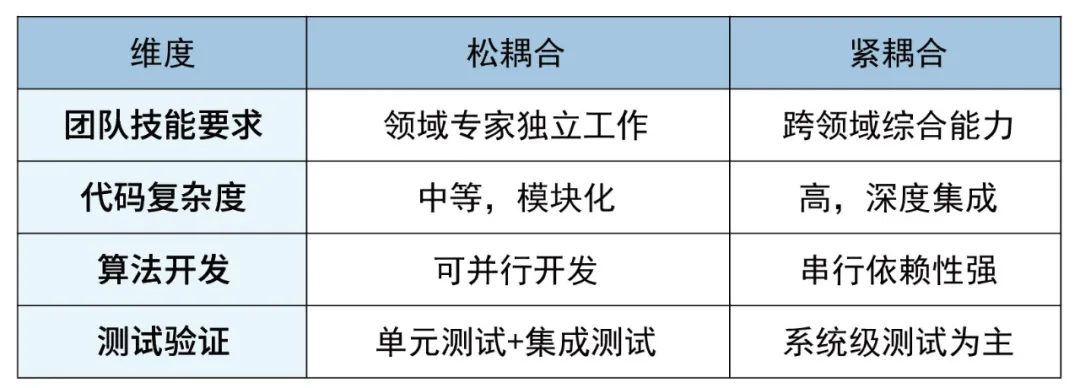
维护成本分析:

推荐使用松耦合的场景:

推荐使用紧耦合的场景:

总结: 紧耦合系统通常应用于需要高性能和低延迟的场景。例如在嵌入式系统中,硬件资源有限,模块之间需要频繁、快速地交换数据,因此紧耦合设计可以最大限度地利用硬件资源。企业级应用通常需要频繁更新和维护,通过松耦合设计可以降低系统的复杂性,使得系统的升级和维护更加容易。建议从松耦合开始,逐步向关键模块紧耦合演进。
在智能化浪潮席卷各行各业的今天,自动驾驶技术正以其卓越的适应性与可靠性,为传统领域注入全新活力,从矿山到农场,从工地到城市,以创新科技赋能产业升级。
