ADAS 高级辅助驾驶系统
辅助驾驶域控制器 VACU
基于TC297的多核心智能网联汽车控制器
概述
ADAS辅助驾驶方案控制核心为整车域控制器VACU,基于毫米波雷达、前向摄像头、盲区监测雷达实现环境感知。 具备前向碰撞预警FCW、自动刹车AEB、自适应巡航ACC、车道偏离预警LDWS、车道保持LKA、盲区监测BSM、等辅助驾驶功能, 并且可针对客户车型和需求定制开发。
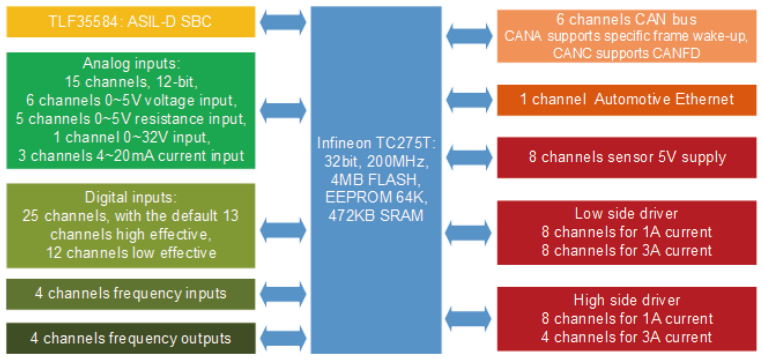
高级辅助驾驶域控制器VACU基于Infineon AURIX TriCore TC297/275设计,整合了VCU和ADAS控制器的功能,具备高性能、ASIL-D功能安全, 实现车辆多控制器功能融合。VACU接收驾驶员的输入信号,如踏板信号、车速信号、档位信号,及其他输入信号,协调电机、电池包以及其他附件系统, 满足驾驶扭矩需求,实现故障诊断与处理、整车状态监控、整车模式转换等功能。

EV22297A 基本参数
| 参数 | EV22297A |
|---|---|
| 主控芯片 | Infineon TC297TP:300MHz,Flash 8MB,SRAM 728KB,支持浮点数运算 |
| 监控芯片 | 系统基础芯片(SBC)TLF35584QVVS2 |
| 供电电压 | DC 12V/24V(9-32V) |
| 峰值电压 | DC 36V |
| 接口要求 | 默认UDS协议,可支持CCP |
| 车载以太网 | 100BASE-T1,1路,支持唤醒 |
| CAN总线 | 6路CAN通讯接口(支持CAN刷写):CANA-CAND支持ISO11898/CANFD功能,CANE、CANF,支持普通CAN和特定帧唤醒 |
| LIN总线 | 2路 |
| EEPROM外部存储 | 64KB |
| 传感器供电输出 | 6路5V:2路5V±2%,最大150mA;4路5V±2%,最大250mA;4路8V轮速传感器电源输出 |
| 模拟输入 | 22路模拟信号输入口:10路0~5V电压型输入,4路0~5V电阻型输入和8路0~32V电压型输 |
| 数字输入 | 13路数字信号输入口:7路高有效,6路低有效 |
| PWM输入 | 4路:支持可配置为数字输入0-batt,2路高有效,2路低有效 |
| 低边驱动 | 18路:7路额定0.5A,峰值1A;7路额定1A,峰值3A;4路额定3A,峰值5A可配置为PWM输出 |
| 高边驱动 | 10路:3路,额定0.5A,峰值1A;2路,额定3A,峰值5A;5路,额定1A,峰值3A,其中2路可以复用做PWM输出 |
| 防护等级 | IP67 |
| 接插件 | 121PIN |
| 尺寸 | 207×150×36mm |
| 外壳 | 压铸铝 |
| 量产情况 | 批量 |