优控Jetson AGX Thor域控解决方案及性能测评
2025年10月15日 BLOG
Jetson Thor 和 Jetson Orin 是 NVIDIA 为自动驾驶和边缘 AI 计算打造的重要平台。它们虽然在技术上同源,但因其不同的性能定位和特性,在自动驾驶的细分应用领域中各有千秋。
为了能快速了解它们的核心区别,下面用一个表格来汇总主要信息:

Jetson Thor 和 Orin的性能评测对比—测试环境
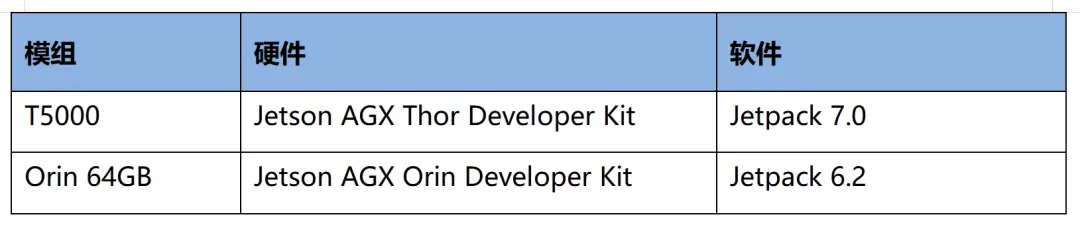
注:以下测试结论仅供参考。
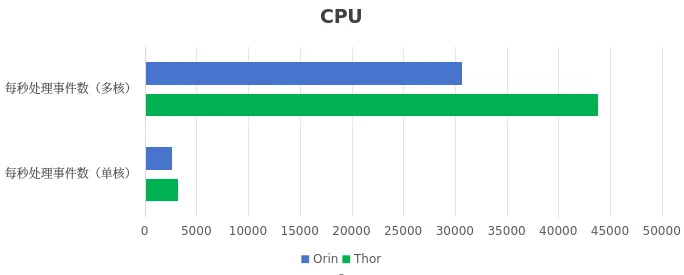
CPU (基于 sysbench 基准测试)
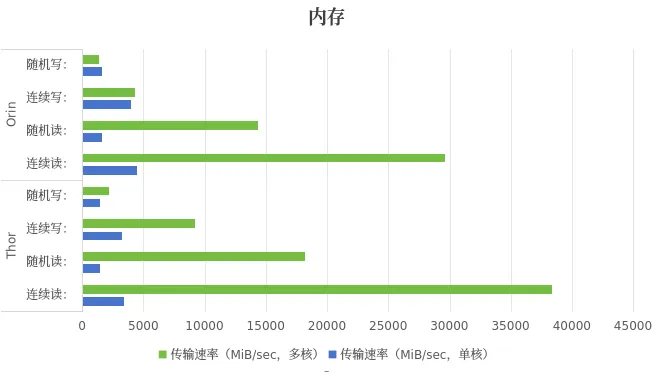
内存(基于sysbench 基准测试)
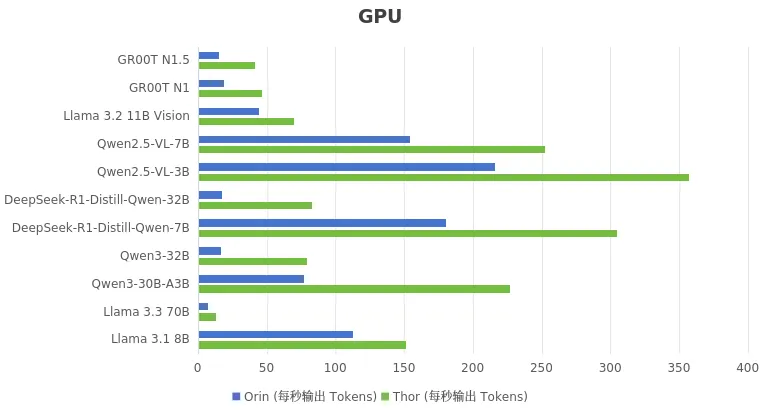
GPU(基于TensorRT 量化模型)
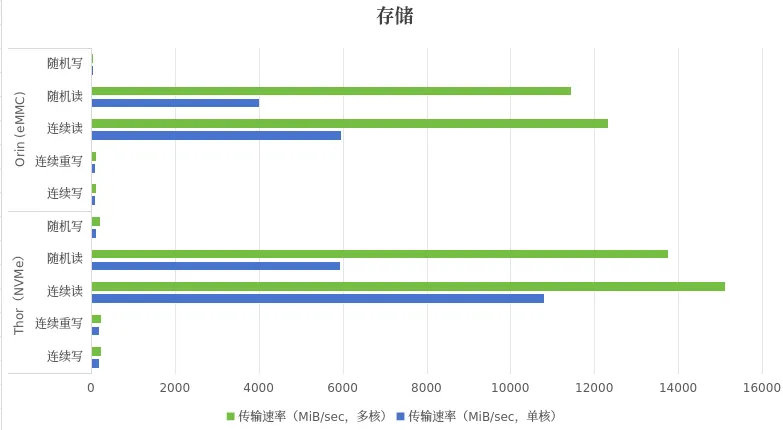
存储(基于sysbench 基准测试)
Jetson Thor 作为新一代旗舰平台,其超强的算力、巨大的内存和高速I/O能力,使其在面向未来的前沿应用中优势明显:
- L4/L5 高阶自动驾驶: Thor 的设计目标就是为高阶自动驾驶提供算力支持。其强大的性能能够处理来自激光雷达、毫米波雷达、摄像头等多种传感器的海量数据,并进行复杂的融合感知、决策规划。
- 复杂多传感器融合与实时处理: Thor 集成了 4个25GbE网络接口和Holoscan传感器桥接器,这意味着它能更好地接入和处理来自大量高速传感器(如多个高清摄像头、高线数激光雷达)的数据流,并进行实时融合与推理,这对于自动驾驶的安全性至关重要。
- 运行生成式AI与大模型: Thor 具备运行视觉语言动作模型(VLA)、大语言模型(LLM)和视觉语言模型(VLM) 的能力。在自动驾驶中,这可能用于更自然的人机交互、对复杂场景的深度理解、以及基于世界模型进行预测和规划等前沿探索。
- 仿真与测试平台: 在自动驾驶开发过程中,Thor 强大的计算能力可以用于构建高性能的仿真测试平台,加速算法迭代和验证。
成熟的平台、出色的能效比和丰富的产品形态,在以下领域表现突出:
- L2+/L3 辅助驾驶 (ADAS): 对于需要实现自适应巡航、自动紧急制动、车道保持等功能的辅助驾驶系统,Orin 提供的算力已绰绰有余。其良好的能效比也更符合车载系统的要求。
- 工业自动化和物流小车: 在仓库、工厂等相对结构化环境中运行的AGV(自动导引运输车)、AMR(自主移动机器人),需要可靠的导航、避障和物体识别能力。Orin 的性能足以胜任,且其平台成熟度有助于加快开发和部署速度。
- 智能视觉分析与监控: 用于交通流量监控、违章识别、停车场管理等场景的智能摄像头或边缘计算设备。Orin 强大的视频解码和AI推理能力能够高效处理多路视频流。
- 成本敏感和快速量产项目: Orin 系列有不同性能和价格的模组可选(如 NX、AGX Orin),方便根据项目需求选择,适合预算有限或需要快速推向市场的项目。
选择Jetson Thor 还是Jetson Orin,可以考虑以下几点:
- **应用场景与性能需求:**项目是否需要处理极其复杂的传感器融合?是否需要运行大型生成式AI模型?是否追求L4/L5级的高阶自动驾驶?如果答案是肯定的,Thor 是面向未来的选择。若需求是成熟的L2+/L3辅助驾驶或一般的移动机器人,Orin 更经济实用。
- 功耗与散热限制: Thor 的功耗高于Orin,这需要为其设计更强大的散热系统,并确保电源功率能够满足要求。
- 开发周期: Orin 平台更成熟,软件栈、开发工具和社区支持都非常丰富,有助于缩短开发周期。Thor 作为新一代平台,虽然兼容原有生态,但初期学习和开发成本可能较高。
- 未来证明与扩展性: 如果希望产品平台在未来几年内能持续应对算法和模型的快速演进,Thor 提供的强大算力和超大内存提供了更大的“未来证明”潜力。
希望这些信息能帮助大家更好地根据具体需求在Jetson Thor 和Jetson Orin 之间做出选择。
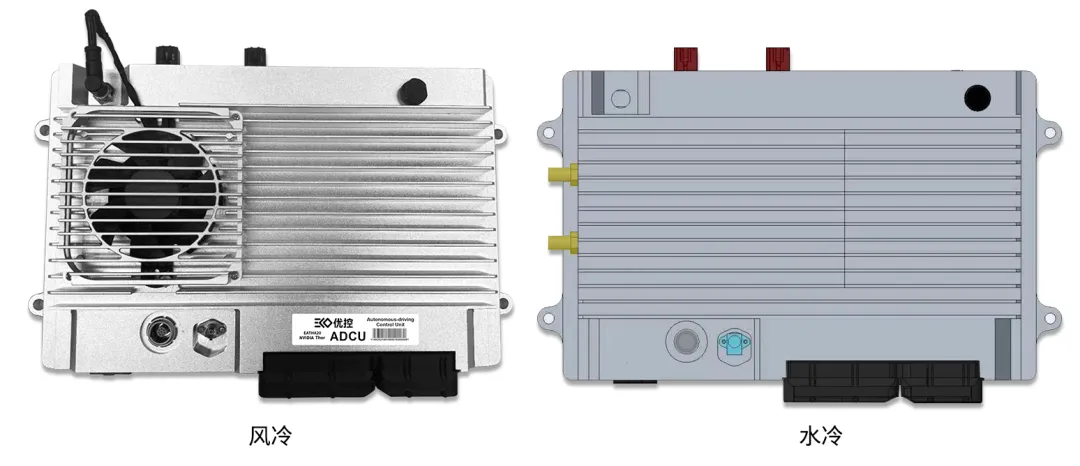

优控推出大算力ADCU,采用英伟达Jetson Thor+英飞凌 TC397架构设计,算力高达2070 TFLOPS,面向L3~L5级无人驾驶应用,它能够将计算密集型传感器数据处理和传感器融合工作与控制策略开发集成到一个控制单元中,并有助于建立结构化和有组织的车辆控制器网络。可以用于无人物流配送、无人环卫、无人矿车、无人巴士、智能工程机械等应用领域。
详情可参看:https://www.eco-ev.com/adcu 做进一步了解,优控期待与您的合作。