矿山无人驾驶全栈解决方案——矿车无人作业智慧调度系统
无人驾驶高速发展的浪潮影响着各行各业,尤其是对于一些限定场景工程作业应用而言,无人化、智能化优势对于行业的变革影响是巨大的,比如物流配送、港口码头运输,以及当前火热的矿山采矿运输。
在国际上,卡特彼勒、小松等在澳大利亚、智利、巴西等多地的露天矿山通过部署智能网联矿卡、通信网络、系统平台等组成的矿卡自动驾驶解决方案,已经实现了矿区自动驾驶的商业化应用,其中卡特彼勒的矿卡产品已经自动驾驶运行近3500 万公里,物料运输量达到10 亿吨。卡特彼勒在上世纪90年代展出自动化矿用车,到2019年底,使用其Cat MineStar (矿山之星)系统的卡车已经安全行驶了6760万公里,运送的物料已达20亿吨,这个数据比2018年11月公布的数据(10亿吨)翻了一倍。
而在国内的矿业公司和工程机械公司,无人驾驶起步较晚,但近年来研发和应用也快速发展。随着国家政策的布局与引导,大数据、人工智能以及5G技术的发展,国内矿山在智能化方面取得了长足进展。如优控智行、踏歌、惠拓等得均提出了无人矿车解决方案并在部分矿区实现了示范运营。

由于矿区作业范围广、地点移动变化大、设备状态变化快,调度难度也大。当前已经实现的大部分无人驾驶矿区,仅仅是样车级别的生产作业,或者小编组作业,一方面集群化改造需要大量的时间成本投入,另一方面缺乏有效合理的调度协同系统和管理机制,无法实现规模化无人作业。
目前说采用传统对讲和跑现场的人工调度方式很难及时、全面、准确掌握现场作业条件的变化。人工调度模式下无法实现对采矿作业人员和设备的实时监督,管理难度大、成本高。因此,智能化的系统调度协同管理平台在矿上无人化进程中成为必然的需求,天津优控智行结合自身在无人驾驶行业的技术积累和应用经验,针对矿山环境无人作业应用需求,提出全栈式无人驾驶系统解决方案,重点解决无人化作业调度协同管理问题。
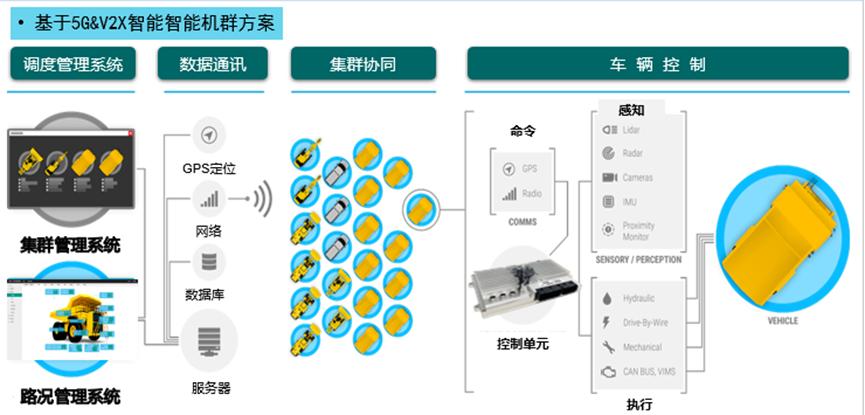
无人矿车智慧作业调度协同管理系统利用通信网络将矿区、车端、路端传感器捕获的全部数据传输到服务器, 结合矿区生产任务计划在控制系统后台计算中心形成最优生产作业任务部署和流程方案,并通过控制台下发指令到车端控制器, 统筹全部生产设备的运行。同时通过远程监控可视化作业场景、监控矿区生产状态,管理系统也可以接入到整个矿区生态, 计算矿区生产运行成本。
1、构建实时数据采集、传输系统
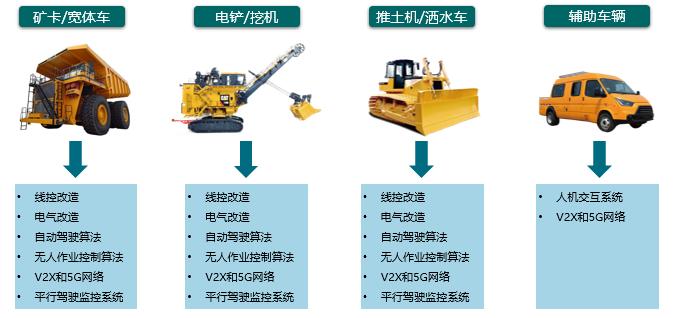
将矿车、电铲、推土机等车辆传感器状态以及激光雷达、摄像头、GPS定位等环境感知和路径信息等实时采集上传;矿区无人驾驶样包括定位、感知、规划、决策, 但是与城市场景的不同就是在于矿区的场景复杂性。在矿山环境下, 没有明显的道路标识线, 这与广为熟知的城市道路与快速路不同, 并且路面往往崎岖不平, 另外道路与矿山特征不明显. 遇到下雨天气, 矿区路面变得十分泥泞, 采用多传感器信息融合技术,设计适用于 AI 芯片的融合算法,针对不同的工况下车辆运动学、动力学特点实现车辆位姿求解,兼顾计算效率与信息完整性,解决矿用卡车安全行驶的需求。
2、矿区无人化集群生产作业调度协同管理
充分考虑矿场生产工艺和作业流程,将装载、运输、卸载、停车、维护等整个生产过程用逻辑算法来处理,高效调配实现无人化自主循环作业;通过接收挖机装载任务信息、无人矿车实时位置及速度信息,分析任务需求和任务位置点信息,综合考虑运输效率、任务等级重要性、车辆装载量等因素,生成车辆调度指令,并下达给无人矿车、电铲、推土机等车辆。通过建立多目标多车型的调度模型和调度管理策略的开发,解决作业任务自动化和车辆管理实时化需求。
3、调度系统管理终端
包括服务器端、车端和监控端,通过监控大屏实施显示当前状态,并可设置作业流程,必要时可远程接管车辆。调度系统上位机平台是作业管理与监控的主体,是矿山运输无人驾驶的综合调度指挥系统,相当于中枢和大脑。由中央显示屏、数据库服务器、地面控制服务器、远程操纵台、地面差分GPS 基站等设备组成。平台功能围绕综合显示与智能调度,以安全、高效、自动化为目标,主要包括数字地图、路径规划、作业调度、运行监控、数据记录等。
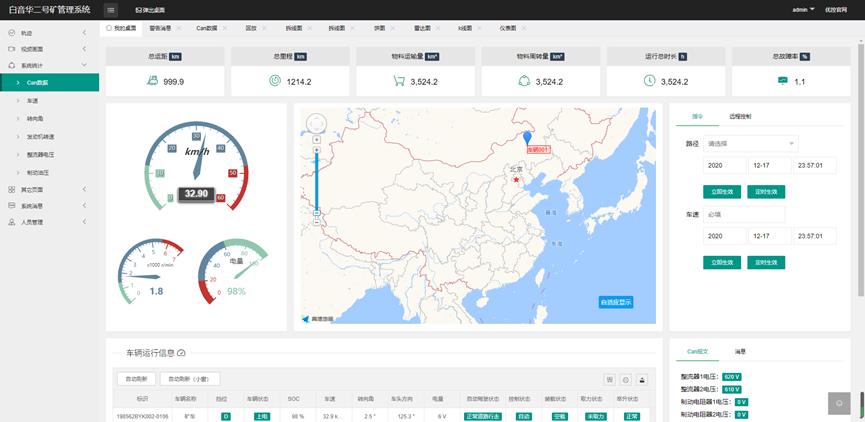
平台提供矿山数字地图,对运输车辆的进行路径规划,在作业过程中获取车辆信息、采集设备状态、自动维护作业进度信息,为用户提供清晰、直观的矿区综合信息和人工干预控制接口,为车辆提供自动作业调度及主动防撞指令。
4、矿山环境三维建模与实时优化
研究了矿山空间实体对象分类与三维建模方法,提出分类建模,实现了点、线、面、体等简单对象的建模和部分复杂实体的建模。采用数据结构,建立矿床地质结构特征,运用计算机图形、图像处理和三维技术进行矿山环境仿真建模。
5、无人驾驶单车智能系统
传感器和通讯技术,是车辆实现无人驾驶和智能管控的基础。传统的矿用车需要搭载先进的车载传感器、控制器、执行器等装置,同时融合现代通信与网络技术,实现车内网、车外网、车际网的无缝链接。单车智能系统具备复杂环境感知、智能化决策、信息共享、自动化协同等控制功能。
与此同时自主研发的机群编队协作施工算法,通过车载域控制器和V2X通讯共享,实现单车智能和机群调度系统级解决方案。
6、多通信组合系统
考虑到矿区不同工作区的特征和通信需求,结合5G、V2X等技术的发展现状,采用多通信系统、加大频带和带宽的方式来增强通信系统的可靠性,提高系统的抗干扰能力。整体网络架构由车载网络端、路侧网络端、通讯基站、云服务器等组成。
7、远程驾驶模拟系统搭建
鉴于远程监管和远程人为接管驾驶的需求,利用车辆环视系统的视频图像为参考,构建平行驾驶系统和模拟驾驶终端。